Alguém pode objetar: ah, essa história de características só funciona para equações simples como a do surfista. Vamos então considerar um exemplo mais “complicado”, para que fique claro que o método é bastante geral, e sempre se reduz a resolver explicitamente algumas EDOs. (As quais, por certo, nem sempre conseguimos resolver, mas podem nos dar informações importantes sobre o comportamento qualitativo das soluções da EDP original.)
Vamos começar pela equação
\displaystyle \partial_t v + v\partial_x v + v^2=0,que é certamente mais complicada que a de Hopf. Vamos procurar soluções dessa equação com condição inicial v(0,x) = e^{x}. Já sabemos que essa equação se reduz ao seguinte sistema de EDO (equação das características)
\displaystyle \dot t = 1, \dot x = v, \dot v =-v^2.tDevemos resolver esse sistema de EDO explicitamente. Notem que a primeira e a última dessas equações têm solução fácil
\displaystyle t(\tau,\sigma) = \tau + t_0(\sigma).
\displaystyle v(\tau,\sigma) = \frac{v_0(\sigma)}{1+v_0(\sigma)\tau}.
A segunda equação fica
\displaystyle \dot x = \frac{v_0(\sigma)}{1+v_0(\sigma)\tau}cuja solução geral é
\displaystyle x(\tau,\sigma) = \log\left(1+v_0(\sigma)\tau \right) +x_0(\sigma).Agora temos que escolher as constantes de integração t_0(\sigma),x_0(\sigma),v_0(\sigma) de maneira a garantirmos a condição inicial v(0,x) = e^{x}. Vamos ecolher t_0=0 , x_0=\sigma e v_0 =e^{\sigma} . Com isso, temos a equação paramétrica da solução que procuramos
\displaystyle t(\tau,\sigma) = \tau ,
\displaystyle x(\tau,\sigma) = \log\left(1+e^{\sigma} \tau \right) + \sigma ,
\displaystyle v(\tau,\sigma) = \frac{1} {e^{-\sigma}+ \tau}.
Porém, não queremos a solução em forma paramétrica, queremos uma expressão relacionando as variáveis originais do problema, t,x,v . Precisamos, portanto, “resolver” as expressões paramétricas para \tau,\sigma. A primeira equação nos permite eliminar \tau. A segunda equação fica
\displaystyle e^x = e^\sigma + te^{2\sigma},cuja solução para \displaystyle e^\sigma é
\displaystyle e^\sigma = \frac{-1\pm \sqrt{1 +4te^{x}}}{2t}.O sinal compatível com as condições iniciais é o “+”. Substituindo-se na expressão de v ficamos finalmente com
\displaystyle v(t,x) = \frac{ \sqrt{1 +4te^{x}} -1}{ ( 1 + \sqrt{1 +4te^{x}})t },Quem duvida que essa é uma solução, pode verificar na mão que ela satisfaz a equação e a condição inicial. É instrutivo também verificar no Mathematica, ou em qualquer outro pacote equivalente. Os comandos:
f := (Sqrt[1 + 4 t*Exp[x]] – 1)/(t*(Sqrt[1 + 4 t*Exp[x]] + 1))
Simplify[D[f, t] + f*D[f, x] + f^2]
no Mathematica darão como resultado
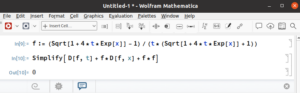
comprovando que, de fato, temos uma solução.
É impostante frisar que só pudemos escrever a solução em forma fechada porque a condição inicial nos permitiu resolver a equação de x(\tau,\sigma) para \sigma. Se a condição inicial fosse, por exemplo, v(0,x)=e^{-x^2}, não seria possível escrever a solução em termos das variáveis iniciais. Porém, teríamos a solução em forma paramétrica
\displaystyle x(t,\sigma) = \log\left(1+e^{-\sigma^2} t \right) + \sigma ,
\displaystyle v(t,\sigma) = \frac{1} {e^{\sigma^2}+ t},
o que é suficiente para inferirmos o comportamento qualitativo das soluções.
Finalmente, vamos considerar um caso em que a EDP não é linear nas derivadas. Por exemplo, a equação
\displaystyle ( \partial_x v)^2 + (\partial_y v)^2 = v .A estratégia de Lagrange-Charpit consiste em considerar essa equação como intersecção de superfícies em um espaço de dimensão mais alta. Introduzindo-se as novas variáveis p=\partial_x v e q=\partial_y v, nossa equação é equivalente às curvas de nível da função \phi:\mathbb{R}^5 \to \mathbb{R}
\displaystyle \phi(x,y,v,p,q) = p^2 + q^2 - v = 0 .A igualdade expressa por essa equação é válida para todos x, y do domínio de interesse. Portanto, temos duas novas condições
\displaystyle \phi_1(x,y,v,p,q) = \partial_x\phi = 2p\partial_xp + 2q\partial_xq -p = 0 .
\displaystyle \phi_2(x,y,v,p,q) = \partial_y\phi = 2p\partial_yp + 2q\partial_yq -q = 0 .
A solução que procuramos é a intersecção \phi \cap \phi_1\cap \phi_2 dessas três hiper-superfícies de \mathbb{R}, dando origem a uma subvariedade de dimensão 2, como já esperamos para as soluções da nossa equação. Levando-se em conta que \partial_yp =\partial_xq, podemos rescrever \phi_1 e \phi_2 como
\displaystyle \phi_1(x,y,v,p,q) = 2p\partial_xp + 2q\partial_yp -p = 0 .
\displaystyle \phi_2(x,y,v,p,q) = 2p\partial_xq+ 2q\partial_yq -q = 0 .
Bem, estas duas equações são do tipo que tratamos anteriormente, linear nas derivadas. Podemos resolvê-las com o método das características. Teremos
\displaystyle \dot x = 2p,
\displaystyle \dot y = 2q,
\displaystyle \dot p = p,
\displaystyle \dot q = q,
\displaystyle v = p^2 + q^2,
As soluções são
\displaystyle p = p_0e^{\tau},
\displaystyle q = q_0e^{\tau},
\displaystyle x = 2p_0(e^{\tau}-1)+x_0,
\displaystyle y = 2q_0(e^{\tau}-1)+y_0,
Para simplificar, vamos tomar as condições iniciais tais que x(0) = 2p_0 e y(0) = 2q_0. Nesse caso, temos p =\frac{x}{2} e q =\frac{y}{2} e a solução final será
\displaystyle v(x,y) = \frac{x^2 + y^2}{4}.